Notes and Derivations for DRL Algorithm
1 Policy Evaluation
1.1 Monte-Carlo Estimation
Recall that
\(R_t(h)=R(s,a)|_t+\gamma\cdot R(s,a)|_{t+1}+\dots+{\gamma}^{H-t-1}\cdot R(s,a)|_{H-1}+{\gamma}^{H-t}R(s,a)|_H\)
\(~~~~~~~~~~=\sum_{\tau=t}^{H} {\gamma}^{\tau-t} R(s,a)|_{\tau}\)
then
\(\begin{aligned} &~~~~\sum_{\tau=t}^{H} {\gamma}^{\tau-t} \delta_{\tau} + v^{\pi}(s_t) \\ &= \sum_{\tau=t}^{H} {\gamma}^{\tau-t} (R(s,a)|_{\tau} + \gamma v^{\pi}(s_{\tau +1}) -v^{\pi}(s_{\tau})) + v^{\pi}(s_t) \\ &=\sum_{\tau=t}^{H} {\gamma}^{\tau-t} R(s,a)|_{\tau} + \sum_{\tau=t}^{H}\gamma^{\tau -t+1} v^{\pi}(s_{\tau +1}) - \sum_{\tau=t}^{H} {\gamma}^{\tau -t} v^{\pi}(s_{\tau}) + v^{\pi}(s_t) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(1)\\ &= R_t(h) + \sum_{\tau'=t+1}^{H+1}\gamma^{\tau' -t} v^{\pi}(s_{\tau' }) - \sum_{\tau=t}^{H} {\gamma}^{\tau -t} v^{\pi}(s_{\tau}) + v^{\pi}(s_t) \\ &=R_t(h) + \gamma^{H+1 -t} v^{\pi}(s_{H+1}) - v^{\pi}(s_t)+ v^{\pi}(s_t) \\ &=R_t(h), \end{aligned}\)
as \(v^{\pi}(s_{H+1})\) remains \(0\) for reaching the end of the states and is never updated, so \(R_t(h) - v^{\pi}(s_t) = \sum_{\tau=t}^{H} {\gamma}^{\tau-t} \delta_{\tau}\).
1.2 \(n\)-Step Returns
Because that
\(R_{t,n}(h)=\sum_{i=0}^{n-1} {\gamma}^{i} R(s,a)|_{t+i} + \gamma^{n} v^{\pi}(s_{t+n})\)
then
\(\begin{aligned} &~~~~\sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i} + v^{\pi}(s_t) \\ &= \sum_{i=0}^{n-1} {\gamma}^{i} (R(s,a)|_{t+i} + \gamma v^{\pi}(s_{t+i+1}) -v^{\pi}(s_{t + i})) + v^{\pi}(s_t) \\ &=\sum_{i=0}^{n-1} {\gamma}^{i} R(s,a)|_{t+i} + \sum_{i=0}^{n-1}\gamma^{i+1} v^{\pi}(s_{t+i +1}) - \sum_{i=0}^{n-1} {\gamma}^{i} v^{\pi}(s_{t+i}) + v^{\pi}(s_t) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(2)\\ &= R_{t,n}(h) - \gamma^{n} v^{\pi}(s_{t+n}) + \sum_{i'=1}^{n}\gamma^{i'} v^{\pi}(s_{t+i'}) - \sum_{i=0}^{n-1} {\gamma}^{i} v^{\pi}(s_{t+i}) + v^{\pi}(s_t) \\ &=R_{t,n}(h) - \gamma^{n} v^{\pi}(s_{t+n}) + \gamma^{n} v^{\pi}(s_{t+n})- v^{\pi}(s_t)+ v^{\pi}(s_t) \\ &=R_{t,n}(h), \end{aligned}\)
so \(R_{t,n}(h) - v^{\pi}(s_t) = \sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i}\), where \(\delta\) follows the same expression as that in (1):
\(\delta_{t+i} = R(s,a)|_{t+i} + \gamma v^{\pi}(s_{t+i+1}) -v^{\pi}(s_{t + i})\)
1.3 Truncated \(\lambda\)-Returns
Given that
\(R_{t,n}^{\lambda}(h)=(1-\lambda)\sum_{i=1}^{n-1}\lambda^{i-1}R_{t,i}(h)+\lambda^{n-1}R_{t,n}\), where \(R_{t,n}\) is the same as (2).
So
\(\begin{aligned} R_{t,n}^{\lambda}(h)=&(1-\lambda)\sum_{i=1}^{n-1}\lambda^{i-1} (\sum_{k=0}^{i-1} {\gamma}^{k} R(s,a)|_{t+k} + \gamma^{i} v^{\pi}(s_{t+i}) ) +\lambda^{n-1}R_{t,n} \\ =&(1-\lambda)\sum_{i=1}^{n-1} \sum_{k=0}^{i-1} \lambda^{i-1} {\gamma}^{k} R(s,a)|_{t+k} ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(3)\\ +&(1-\lambda)\sum_{i=1}^{n-1}\lambda^{i-1}\gamma^{i} v^{\pi}(s_{t+i}) +\lambda^{n-1}R_{t,n} \end{aligned} \label{eq}\)
Then we can start writing similar manipulation for \(\delta_{t+k}\) to equivalent the \(R(s,a)\) contained in Eq.3, as:
\(\begin{aligned} \sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}\delta_{t+k}=&\sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}(R(s,a)|_{t+k} + \gamma v^{\pi}(s_{t+k+1}) -v^{\pi}(s_{t + k})) \\ =&\sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}R(s,a)|_{t+k} \\ +&\sum_{i=1}^{n-1}\lambda^{i-1}( \sum_{k=0}^{i-1}\gamma^{k+1} v^{\pi}(s_{t+k+1}) - \sum_{k=0}^{i-1} {\gamma}^{k} v^{\pi}(s_{t+k}) ) \\ =&\sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}R(s,a)|_{t+k} +\sum_{i=1}^{n-1}\lambda^{i-1} (\gamma^i v^{\pi}(s_{t+i})-v^{\pi}(s_t)) ~~~~~~~~~~~~~~~~~~~~~~~(4)\\ =&\frac{R_{t,n}^{\lambda}(h) - \lambda^{n-1}R_{t,n}}{1-\lambda} - \sum_{i=1}^{n-1}\lambda^{i-1} v^{\pi}(s_t) \\ =&\frac{R_{t,n}^{\lambda}(h)}{1-\lambda} - \frac{\lambda^{n-1}}{1-\lambda} (\sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i}+v^{\pi}(s_t)) - \frac{1-\lambda^{n-1}}{1-\lambda} v^{\pi}(s_t) \\ =&\frac{R_{t,n}^{\lambda}(h)-v^{\pi}(s_t)}{1-\lambda}- \frac{\lambda^{n-1}}{1-\lambda} \sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i}. \end{aligned}\)
This gives that,
\(\begin{aligned} R_{t,n}^{\lambda}(h)-v^{\pi}(s_t)=&(1-\lambda)(\sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}\delta_{t+k})+\lambda^{n-1}\sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i} \\ =&\sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}\delta_{t+k} - \sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i}\gamma^{k}\delta_{t+k} +\lambda^{n-1}\sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i} \\ =&\sum_{i=1}^{n-1}\sum_{k=0}^{i-1}\lambda^{i-1}\gamma^{k}\delta_{t+k} - \sum_{i'=2}^{n}\sum_{k=0}^{i'-2}\lambda^{i'-1}\gamma^{k}\delta_{t+k} +\lambda^{n-1}\sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i} \\ =&\delta_t +\sum_{i=2}^{n-1}\lambda^{i-1}\gamma^{i-1}\delta_{t+i-1}- \sum_{k=0}^{n-2}\lambda^{n-1}\lambda^{k}\delta_{t+k}+\lambda^{n-1}\sum_{i=0}^{n-1} {\gamma}^{i} \delta_{t+i} ~~~~~~~~~~~~~~~~~~~~~~~~(5)\\ =&\delta_t +\sum_{i=2}^{n-1}\lambda^{i-1}\gamma^{i-1}\delta_{t+i-1}+\lambda^{n-1}{\gamma}^{n-1} \delta_{t+n-1} \\ =&\sum_{i=1}^{n}\lambda^{i-1}\gamma^{i-1}\delta_{t+i-1} \\ =&\sum_{i=0}^{n-1}\lambda^{i}\gamma^{i}\delta_{t+i} \end{aligned}\)
2 Policy Learning
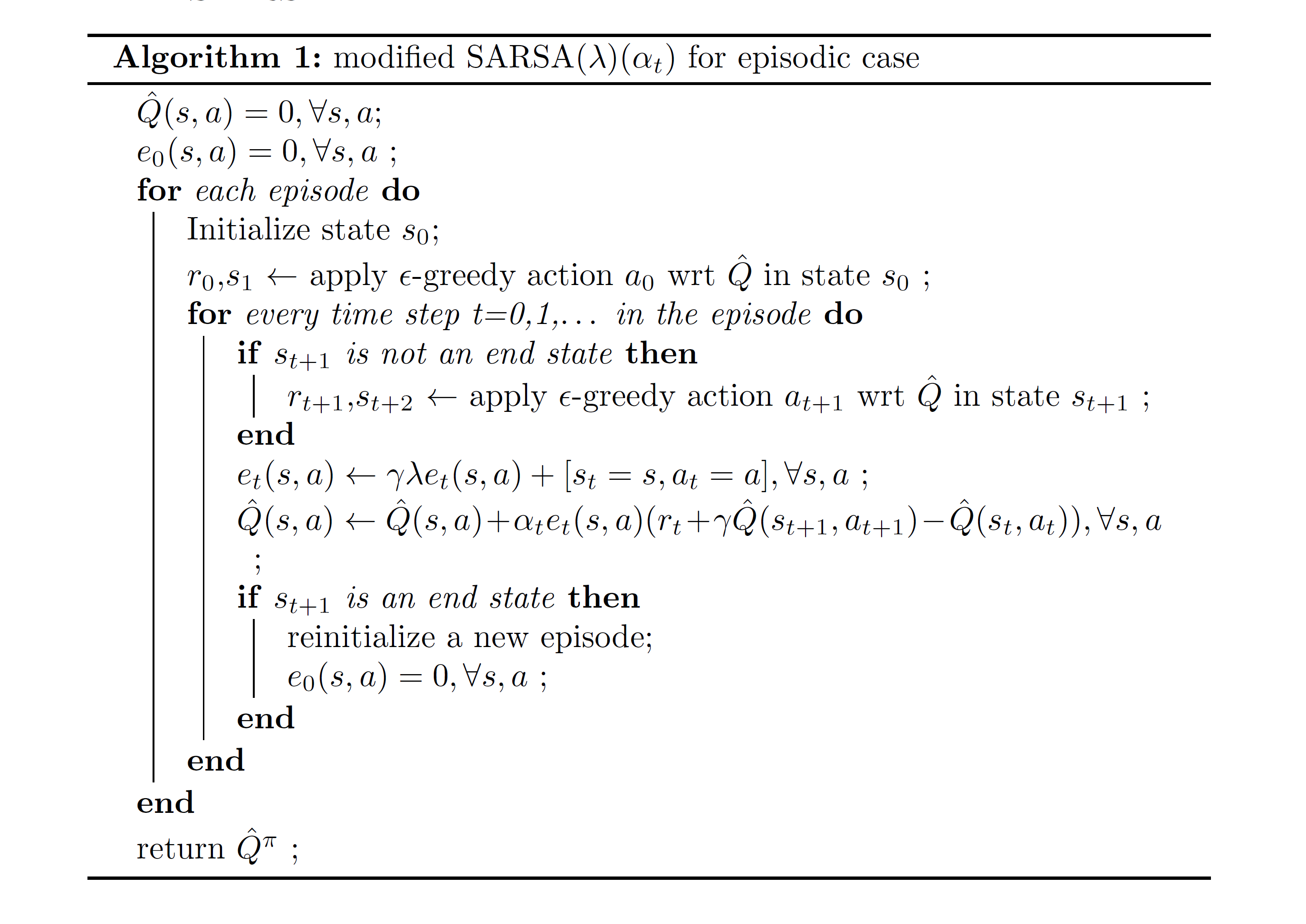
2.1 SARSA
2.2 Convergence Issue of Linear Q-Learning
2.2.1 \(Q^\pi\)-Function
The relation of \(Q^{\pi}\) and \(v^{\pi}\) is that
\[~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~Q^{\pi}(s,a)=r(s,a) + \gamma \sum_{s'}P(s'|s,a)v^{\pi}(s').~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\]For a linear quadratic regulator (LQR) problem, the reward \(R\) is defined quadratically from the state \(s\) and action \(a\). Once the action is chosen for a state, the transition to the next state and gained reward is certain, and by the quadratic form of \(v^{\pi}\), the relation is further expressed as
\[~~~~~~~~~~~~~~Q^{\pi}(s,a)= -s^2 -a^2 +\gamma \cdot K_{\pi} (s+a)^2 = \left[ \begin{array}{cc} s& a \end{array} \right] \left[\begin{array}{cc} \gamma K_{\pi}-1 &\gamma K_{\pi}\\ \gamma K_{\pi}&\gamma K_{\pi} -1\\ \end{array}\right] \left[\begin{array}{c} s\\ a \\ \end{array}\right],~~~~~~~~~~~(6)\]and this matrix is denoted as \(H_{\pi}\).
2.2.2 Optimal Bellman Equation with \(Q\)*-Function
Recall the relation \(v^{\pi}(s)\), \(v^*(s)\), \(Q^{\pi}(s,a)\), and \(Q^*(s,a)\):
\[\begin{aligned} V(s)&=E_a[Q(s, a)] \\ &~ \\ V^\pi(s) &= E_{a \sim \pi(a \mid s)}E_{s\prime \sim p(s\prime \mid s, a)}[ r(s, a, s\prime) + \gamma V^\pi(s\prime)] \\ &~ \\ V^\pi(s) &= E_{a \sim \pi(a \mid s)}[Q^\pi(s, a)] \\ &~ \\ Q^\pi(s, a) &= E_{s\prime \sim p(s\prime \mid s, a)} [r(s, a, s\prime) + \gamma E_{a\prime \sim \pi(a\prime \mid s\prime)}[Q^\pi(s\prime, a\prime)]] \\ &~ \\ V^*(s) &= \max\limits_a E_{s^\prime \sim p(s^\prime \mid s, a)}[r(s, a, s^\prime) + \gamma V^*(s^\prime)] \\ &~ \\ Q^*(s, a) &= E_{s^\prime \sim p(s^\prime \mid s, a)}[r(s, a, s^\prime) + \gamma \max\limits_{a\prime} Q^*(s^\prime, a^\prime)], \\ &~ \\ and~~~v^*(s)&=Q^*(s,\pi_*(s))=\max\limits_{a}Q(s,a). \end{aligned}\]The relation of \(Q^{*}(s,\pi_*(s))\) and \(Q^{*}(s',\pi_*(s'))\) is then:
\[\begin{aligned} Q^{*}(s,\pi_*(s))=&r(s,\pi_*(s)) + \gamma Q^{*}(s',\pi_*(s')) \\ \Rightarrow \\ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~K_{*} (s)^2=& -s^2 -a^2 +\gamma \cdot K_{*} (s+a)^2,~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(7) \\ =&[s~ a] \left[\begin{array}{cc} \gamma K_{*}-1 &\gamma K_{*}\\ \gamma K_{*}&\gamma K_{*} -1\\ \end{array}\right] \left[\begin{array}{c} s\\ a \\ \end{array}\right], \end{aligned} \label{eq:q}\]because the policy is deterministic and fully transfers to the next state as \(s'=s+a_{\pi_*}(s)\), and provided that \(v^{*}(s)\) is a specific choice of \(v^{\pi}(s)\) which follows \(v^{*}(s)= K_* s^2\), where \(v^*(s)\) also equals \(Q^*(s,\pi_*(s))\) and that matrix is denoted as \(H_{\pi *}\) .
2.2.3 \(Q\)*-Function
To optimize a policy, for each state \(s\), the chosen action \(a=\pi(s)\) should diminish the gradient of \(Q\) value regarded with \(a\), as from above quadratic formulation of \(Q^*\) as Eq.7 we know the problem must be convex. This means
\[\begin{aligned} \forall s, \frac{dQ^*(s,a)}{da} =& -2a + \gamma \cdot 2 K_* (s+a) =0,\\ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~a=& \frac{\gamma K_*}{1-\gamma K_*} s = \lambda s,~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(8)\\ so ~\lambda = & \frac{\gamma K_*}{1-\gamma K_*} . \end{aligned} \label{eq:gamma}\]From Eq.7 we can also have the relation:
\[\begin{aligned} Q^*(s)-\gamma Q^*(s') = -s^2 -\pi(s)^2 &= v^*(s) - \gamma v*(s') \\ = -s^2 -(\lambda s)^2 &= K_* s^2 - \gamma K_*( s+\lambda s)^2 \\ \Rightarrow ~~~-1- \lambda^2&= K_* - \gamma K_*(1+ \lambda )^2 ,\\ \end{aligned}\]and by the relation of Eq.8:
\[\begin{aligned} -1- (\frac{\gamma K_*}{1-\gamma K_*})^2= K_* - &\gamma K_*(1+ \frac{\gamma K_*}{1-\gamma K_*})^2 \\ \Rightarrow ~~~ \gamma ^2 K_*^3 +(2 \gamma^2 -2 \gamma) K_*^2 &+ (1-3 \gamma) K_* +1 =0 \\ \end{aligned}\]For this cubic algebraic equation, only the minus sign solution \(K^{*}_{^-}\) is allowed because from the reward \(-s^2-a^2\) we know the value function has to be a negative value.
Therefore,
Some conclusion are, from \(K_*\) and the relation of Eq.8 one can obtain that the best linear policy would give \(a(s) = \lambda s\). From the reward \(-s^2 -a^2\) one know that a good policy must try to transfer the state closing \(s=0\), meanwhile also maintain the largest reward gained through this process. And this should also be related to \(\gamma\), for the situation of this question it gives such a \(\lambda\) and \(K_{*}\). From the result one can find \(K_* = \lambda_* -1\). If not writing \(\gamma\) as a precise quantity but remain the letter symbol in above equations, from the analytic solution, one can find this relation always holds regardless the choice of \(\gamma\) for such a linear quadratic regulator question.