Autonomous Path Planning and self-Docking Control!
autoDock
A boat self-docking experiment based on RGBD camera and scene reconstruction, position/posture recognition, Minimum-Snap path planning, LAN signal transmission, PID motor control.
Table of Contents
Features
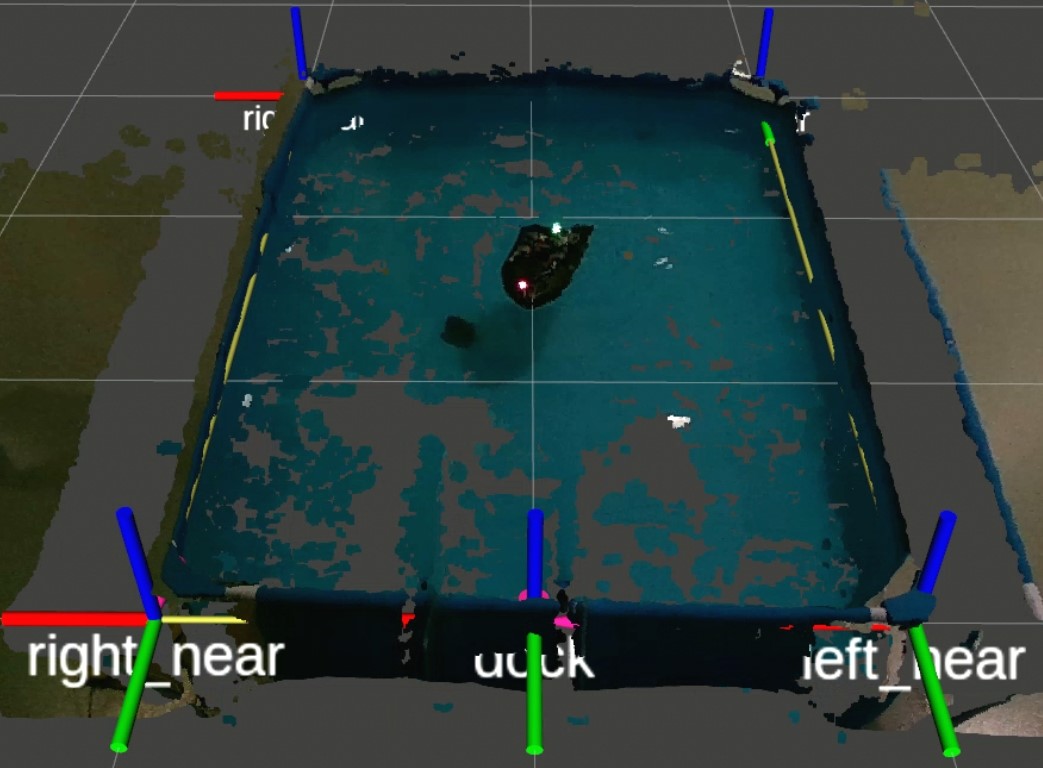
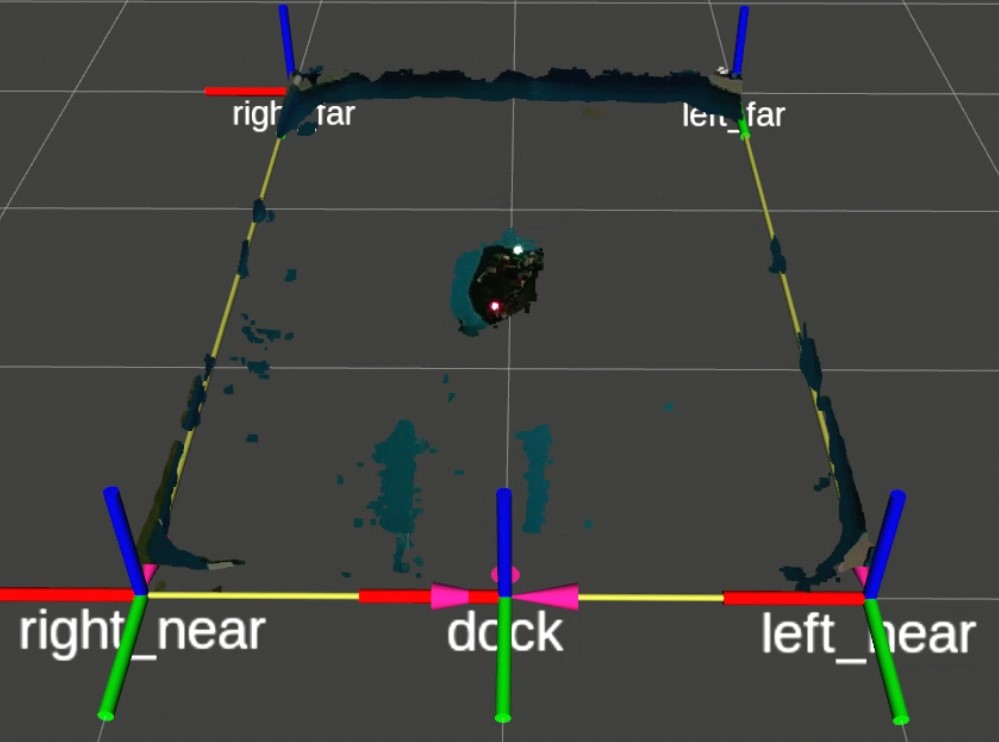
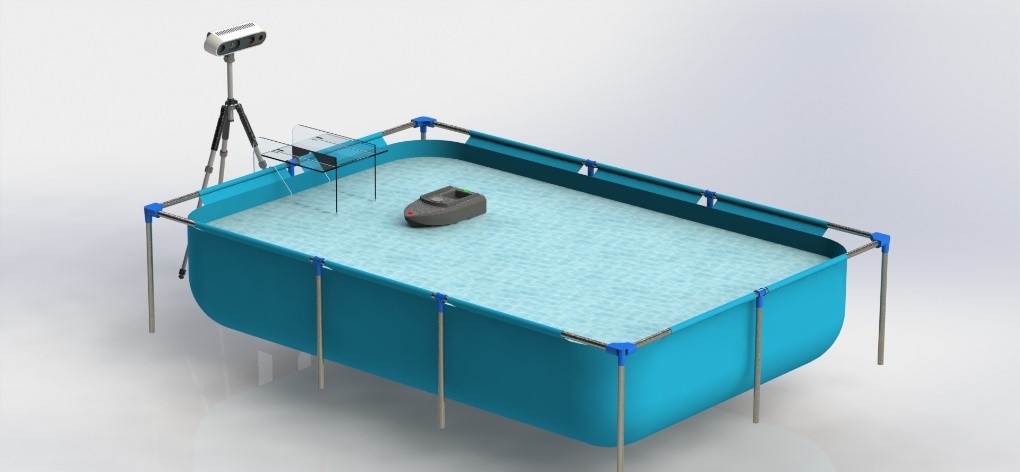
- RGBD camera shooting, coordinate correction, and scene reconstruction (Point Cloud).
- Boat position/orientation, water elevation, shielding, recognition and denoising algorithm (Computer Vision).
- Path planning algorithm (Minimum Snap) for shortest docking course.
- Timestamp targeted motion control through PID algorithm, optimized by parameter fine-tuning.
- Wireless Telecommunication through Server-Client softAP connection via ESP8266 microchip, for command transmission between PC and SCM on the boat.
- Electromechanic development on Arduino, receiving signal from ESP8266 WiFi module, processing with UNO, and enabling motor reaction by L298N.
Prerequisite
1
2
3
4
5
6
7
# if a clound center is needed, we can utilize Curl to have internet connection
git clone -b verison https://github.com/curl/curl.git
cd curl-verison
./configure --with-openssl --prefix=$HOME/workingDIR
make
make install
# also, the Eigen header files can be helpful
- Arduino
- ROS
Usage
- Embed all .ino files to Arduino mother board, and compile all c++ files to run repeatedly while receving inputs from RGBD camera platform.
Demo

This post is licensed under CC BY 4.0 by the author.